|
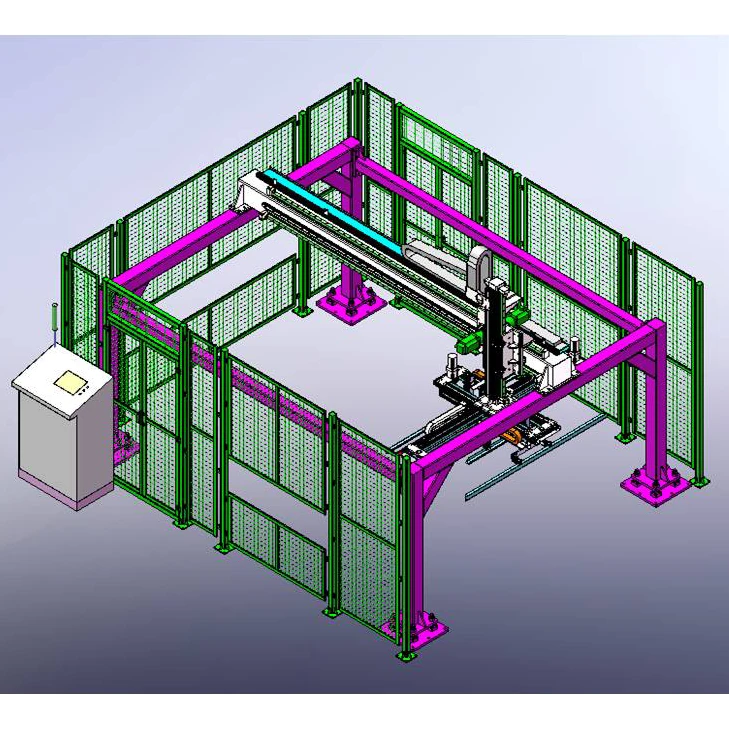
توابع تجهیزات و معرفی
1. رشد مؤلفه در داخل و خارج.
2. روش انتقال: انتقال تسمه سنکرون.
3. به طور خودکار قاب را بگیرید و آن را روی دستگاه قاب قرار دهید.
4. سروو موتور تسمه سنکرون را به حرکت در می آورد و باعث می شود که گیره به موقعیت تعیین شده برای موقعیت دقیق حرکت کند.
5. ساختار اصلی تجهیزات توسط جوش مربعی ساخته شده است.
6. ترکیب سیلندرهای متعدد برای گرفتن آسان.
7. بازوی ربات قاببندی خودکار دارای ساختار L شکل، با یک کنسول کوتاهتر و ساختار پایدارتر است.
8. روش کنترل: کنترل حرکت + درایو سروو.
پارامترهای عملکرد اصلی تجهیزات
مشخصات اجزای قابل اجرا: اجزای سازگار شامل اجزای شیشه دوبل با طول 1500 میلی متر-2000 میلی متر و محدوده عرض 600 میلی متر-1000 میلی متر و همچنین اجزای معمولی هستند.
ریتم کار: تقریباً 29 ثانیه
حداکثر ظرفیت تولید: تقریباً 2979 قطعه در روز
اپراتور آنلاین: ندارد
وزن: تقریبا 2100 کیلوگرم
توان نامی (KW): 5.62KW
مصرف گاز (L/min): 10L/min
فشار (MPa): 0.6-0.8MPa
نویز (dbA): 72dB
ابعاد خارجی (طول x عرض x ارتفاع): 4100mm x 4770mm x 2300mm (شامل مش محافظ)
مزایا مقدمه
1. تجهیزات توسط یک موتور سروو هدایت می شود که توسط چرخ دنده ها و قفسه ها هدایت می شود و توسط یک ریل راهنمای خطی هدایت می شود که دارای مزایای موقعیت یابی دقیق و عملکرد صاف است.
2. کل دستگاه مجهز به حصار ایمنی است که حفاظت ایمنی را فراهم می کند.
3. کل دستگاه مجهز به حفاظت خاموش و گاز خاموش است.
4. کل فرآیند گرفتن قاب توسط کنترل پنوماتیک تکمیل می شود که کارآمد و راحت است.
5. تجهیزات کنترل کاملا اتوماتیک، بدون نیاز به مداخله پرسنل.
6. رابط برنامه نویسی ساده و کاربر پسند است.
|