|
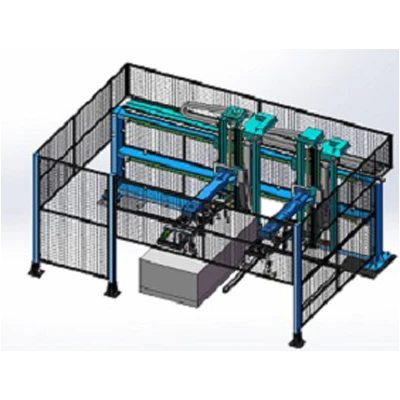
کارکرد و معرفی
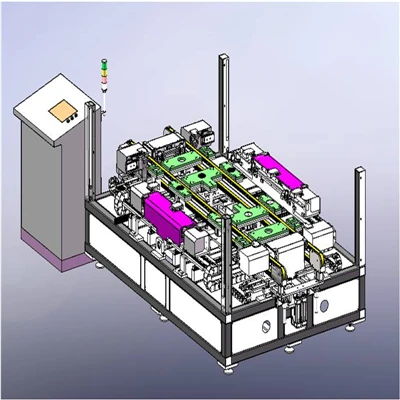
گرفتن شیشه و گذاشتن آن به خط انتقال
1. سیستم بارگیری شیشه از بازوی ربات متحرک شیشه ای و بازوی ربات جمع کننده کاغذ تشکیل شده است.
2. دستگاه شامل دو ایستگاه ذخیره سازی شیشه ای و یک ایستگاه ذخیره سازی کاغذ است.
3. بازوی ربات متحرک شیشه ای شیشه را روی خط انتقال قرار می دهد، در همان زمان بازوی ربات چیدن کاغذ کاغذ را بردارید.
4. ماشین رانده شده توسط موتور سروو، مکنده شیشه را به ایستگاه تعیین شده می کشد.
5. بازوی ربات بارگیری شیشه دارای ساختار کنسولی است و بازوی ربات چیدن کاغذ ساختار دروازه ای است.
پارامتر اصلی
قالب ماژول: (1580-2000)mm*(800-1000)mm
زمان چرخه:<35s
Max capacity: >2468 در روز
اپراتور آنلاین: هیچ
توان نامی: 8.26 کیلووات
فشار: 0.7MPa+0.1
ولتاژ ورودی: 380 ولت
ابعاد: 4610mmx2780mmx2150mm
مزیت - فایده - سود - منفعت
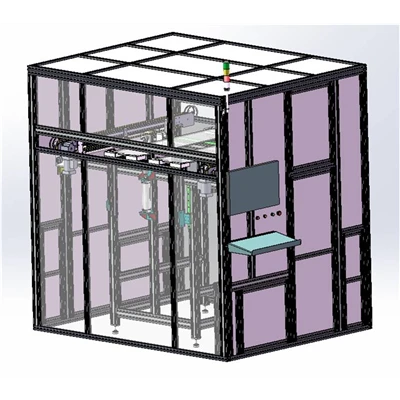
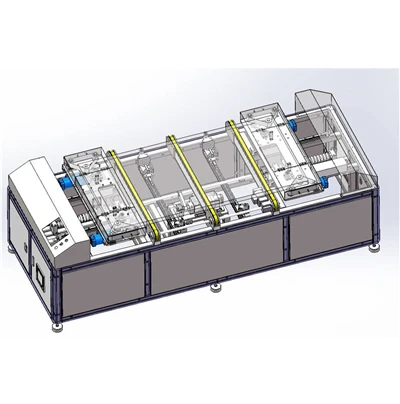
1. دستگاه از ساختار فولادی با بدنه قاب جوشکاری، استحکام بالا، قابلیت اطمینان و ثبات در هنگام بارگیری استفاده می کند.
2. صفحه مکش حامل شیشه ای از پلی اورتان ساخته شده است که در حین بارگذاری روی شیشه چاپ نمی شود.
3. سروو موتور دقیق و پایدار در حال اجرا است.
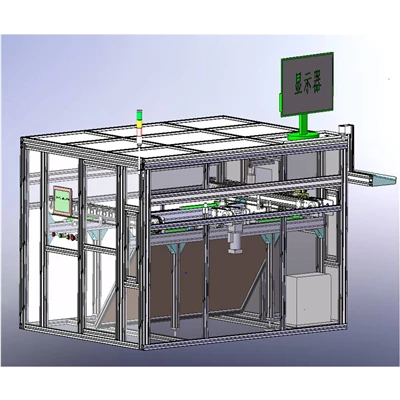
4. دستگاه مجهز به حصار ایمنی برای اطمینان از ایمنی عملیات است.
5-کاهش عدم قطعیت بارگذاری توسط اپراتور، افزایش خروجی.
6. دستگاه تمام اتوماتیک است و نیازی به دخالت انسانی ندارد.
|